


Felipe CarvalhoPontifical Catholic University of Rio de Janeiro - PUC-Rio |

Academic Background
|
Doctor of Science Degree in Informatics (Computer Graphics) at PUC-Rio. Since 02/2009. Pontifícia Universidade Católica do Rio de Janeiro, PUC/RJ, Rio De Janeiro, Brasil Title: HybridDesk: An approach for Transitions between Interfaces in a Semi-immersive Hybrid System Advisor: Alberto Barbosa Raposo Co-Advisor: Marcelo Gattass Grant from Conselho Nacional de Desenvolvimento Científico e Tecnológico (CNPq)
Master Degree in Informatics (Computer Graphics and Game-AI) at PUC-Rio. Since 03/2004.
Computer Science Degree (Computer Graphics) at UFAM. Since 2001. CV Lattes : link. |
Research
Felipe Carvalho is Senior Researcher at the Augmented Reality and Digital Interaction Area of Tecgraf/PUC-Rio Institute. He is an expert in the areas of Computer Graphics, Virtual Reality and 3D Interaction. His current research focuses on the area of Computer Graphics, with emphasis on Virtual Reality for Robotics Simulation. At Tecgraf, he is a development team leader in R&D Projects with the industry sector.
Participation in Projects

|
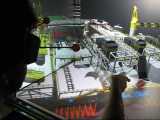
Tupi's Virtual Reality Pilot Project for CENPES II Inauguration on 07/10/2010 (an expansion of the Petrobras research center on Rio de Janeiro). Development of high interactive virtual relaity CAVE Application to demonstrate oil & gas platforms and subsea oil recovery systems. The project was demonstrated to Lula president and other leaders. |
|
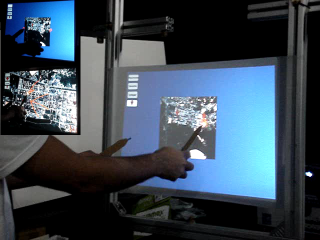
Interactive WhiteBoard using pen based interaction. Video1 |
|
Development of MultiTouch Interaction and Device using Conventional and Polarized 3D Stereo Screens. Video1 Video2 Video3 |
|
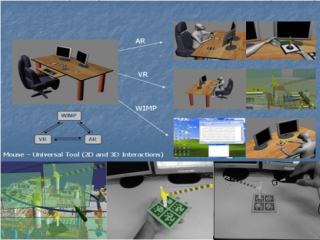
Hybrid User Interface using Head Mounted Display. This work presents an alternative to include immersive virtual reality in hybrid user interfaces in a common desktop setup. In addition, it is proposed the integration of a 2D WIMP (Windows, Icons, Menus and Pointing Device) environment with virtual and augmented reality interactive environments in the hybrid interface. |
 

|
HybridDesk - An Approach for Transitions between Interfaces in Semi-Immersive Hybrid System. This Thesis aims to propose a technological setup (a set of interaction devices) to integrate the advantages of different functional environments. The transitional interactions between them are explored by investigating the design properties (dimensional congruency and properties of continuity) during the 3D annotation task execution. In order to achieve such a goal, a semi-immersive environment composed of 3 functional environments was developed. That composition includes a set of devices enabling the tasks of text edition (2D), navigation and manipulation (3D). Assuming that 3D annotation forces transitions between the integrated functional spaces, an exploratory study was conducted with users to investigate the behavior of interaction during these transitions by identifying the influence of the design properties discussed in this work. pdf Video1 Video2 Youtube link |
|
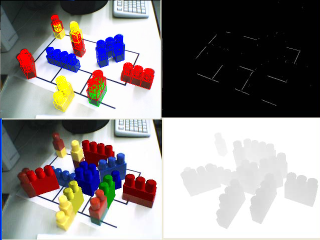
Occlusion Handling in Augmented Reality and Line-Based Markers. |
|
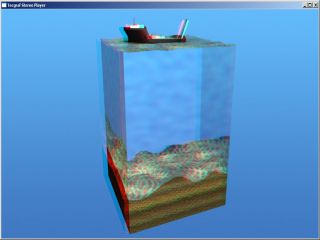
TecStereoPlayer - Stereoscopic Video Player. |
|
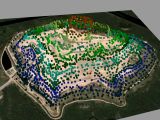
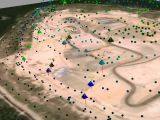
VisGramacho - 3D Visualization for Gramacho Gardens landfill. System for monitoring the largest gardens landfill in Latin America. The process consists in visualization of displacement markers along the time as well the visualization of changes in the terrain topology. . |

|
TTS - TACTICAL TRAINING SIMULATOR. TTS is an advanced project for training of cops, officers militaries and security agents dedicated to technical applications and operational-tactical offering realistic simulated experiencesfrom quotidian situations. The system offers a graphic scenario with episodes controlled by the instructor with different difficult levels. |
|
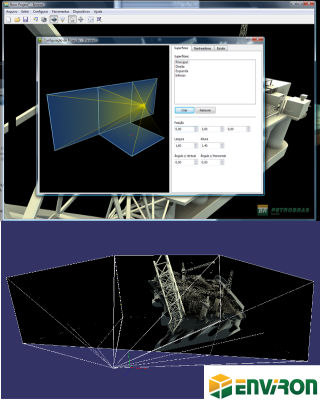
Environ: Virtual reality Tool for Engineering Projects (VrOutput Module). Environ is an application driven by demand in the use of Virtual Reality (VR) in large engineering models generated by CAD tools. The main objective of Environ to provide resources for CAD models of 3D visualization with enough realism to be used for simulation and analysis of offshore operations, virtual prototyping, design review, training, among other activities. More recently, the 3D CAD models have begun to show its potential for other purposes, such as ergonomic studies, safety training, physical simulations, documentation of project and monitoring of operational data in real time. However, there are still many challenges in the use of VR models in CAD as well interaction issues with that. VrOutput is module of Envrion to handle the screens output (4 sides CAVE ,2 sides Workbenchs,...) by creating and managing dynamic multi-frustum setups. . |

|
VI3D – Interactive Video . Research and development of a framework for the joint use of 3D interaction techniques and stereoscopic videos. |
|
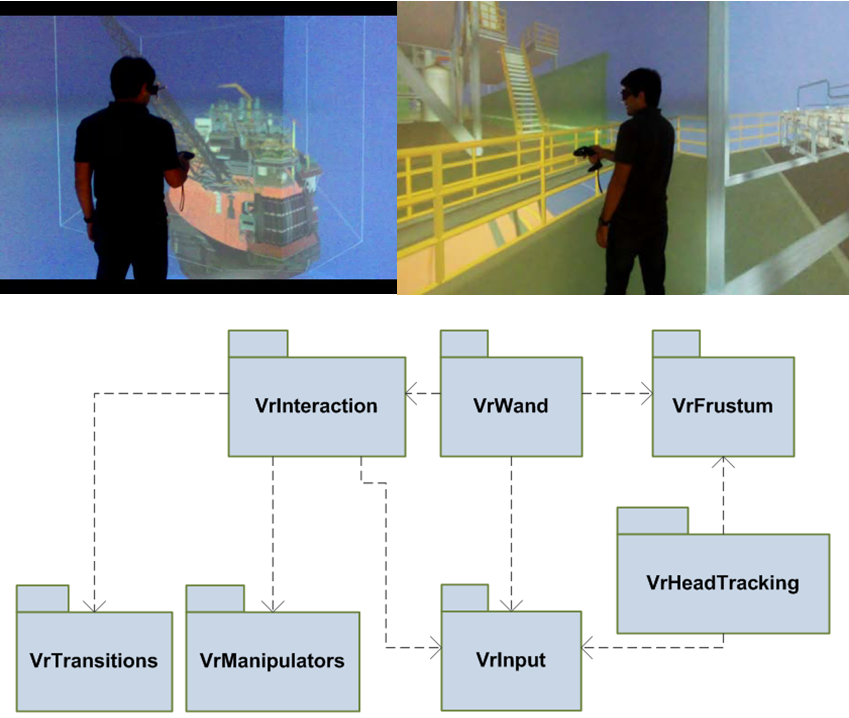
LVRL Framework - The LVRL(Lightweight Virtual Reality Libraries) main objective is to provide a minimalist programming interface and non intrusive allowing the development of VR applications by non VR developers. |

|
SimUEP AmbSim - Research and development of a virtual training system for real operation on oil and gas platforms |
|
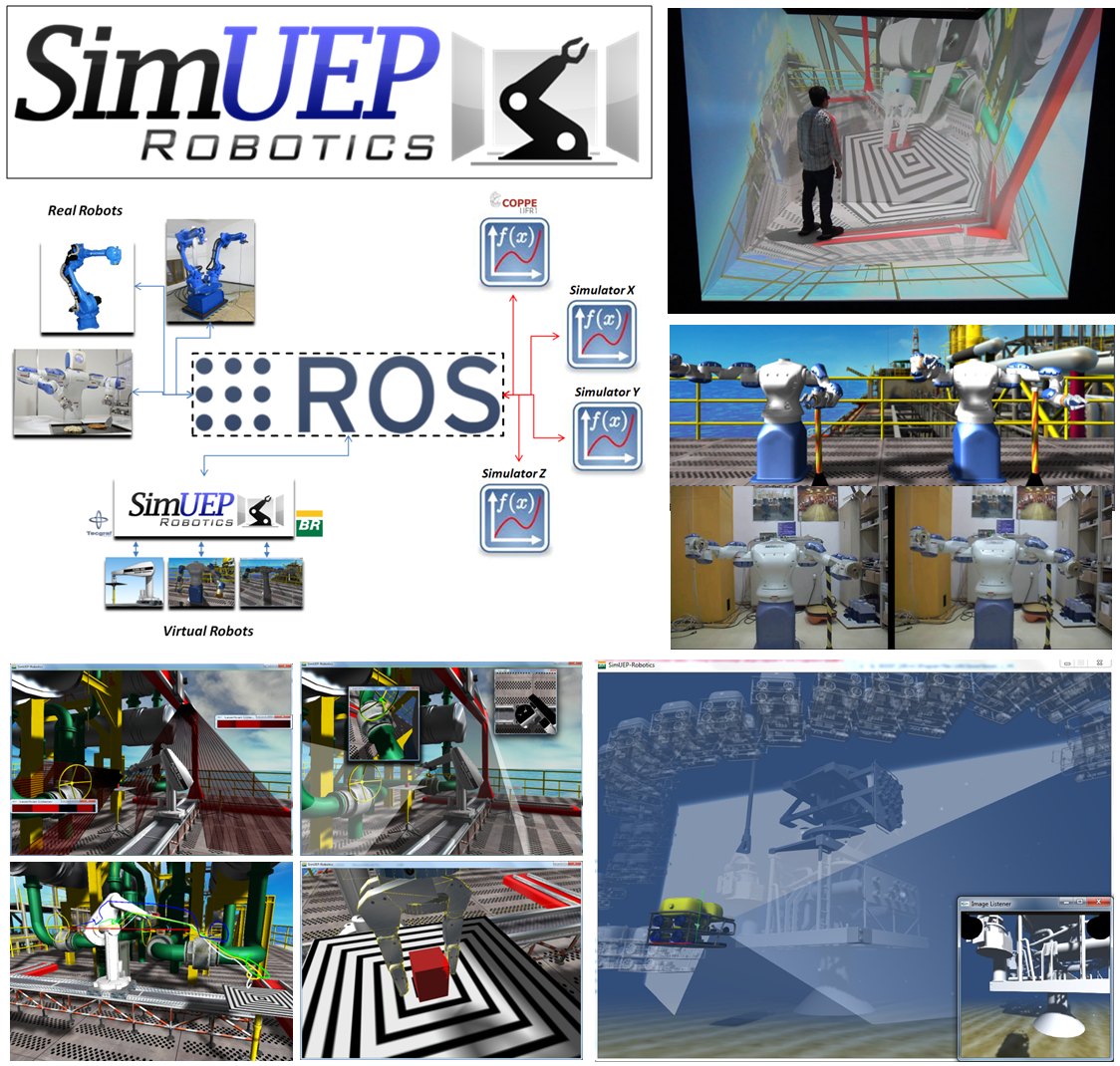
SimUEP Robotics - Research and development of visualization environment to design and simulate the substitution of humans by robots in hazardous operations in Stationary Production Units. Use visualization techniques to analyze, plan and optimize the movements performed by the robots during the execution of different tasks. The integration of ROS(Robot Operating System) in SimUEP-Robotics allows the creation of a communication layer between the visualization of a virtual scene and the simulation of real robot´s tasks. |
Publications
| Update list on CV Lattes: link |
| Carvalho,F.G. , Raposo,A.B., Gattass,M. ., A transitional interface between 2D/3D functional spaces in a desktop semi-immersive system,
VRCAI 2009 – The 8th International ACM Conference on Virtual-Reality Continuum and Its Applications in Industry, Yokohama, Japan, 2009 |
| Carvalho,F.G. ,Dam, P., Soares,L.P., Raposo,A.B., Corseuil,E.T.L.,Ismael,I.H.F. Virtual Presence Mixing 3D Video and Interactive Scenes,
X Simposium on Virtual and Augmented Reality – SVR 2008, João Pessoa, May, 2008 |
| Carvalho,F.G. , Raposo,A.B., Gattass,M. Uma Interface Híbrida para Desktop Integrando Realidade Virtual, Realidade Aumentada e 2D WIMP,
IX Simposium on Virtual and Augmented Reality – SVR 2007, Petrópolis, 2008 |
| Carvalho,F.G. , Raposo,A.B., Gattass,M. An Approach for Enabling the Use of Immersive Virtual Reality in Desktop Hybrid Interfaces,
Proceedings of the Second IASTED Int. Conf. on Human-Computer Interaction, Chamonix, 2007 |
| Carvalho,F.G. ,Bastos, T.A., Raposo,A.B., Corseuil,E.T.L.,Szenberg,F., Azevedo,L. Uma Ferramenta para a Composição de Vídeos Interativos,
”. VIII Symposium on Virtual Reality – SVR 2006, Pará, 2008 |
| Hofman,M.,Carvalho,F.G. ,Szenberg,F., Raposo,A.B., Gattass,M. ., Um Estudo sobre Marcas Fiduciais em Realidade Aumentada: Combinando Detecção de Linhas com Calibração de Câmera,
VIII Symposium on Virtual Reality – SVR 2006, Pará, 2008 |
| Carvalho,F.G., Hofman,M.,Szenberg,F., Raposo,A.B., Gattass,M. ., Uma Abordagem para o Tratamento de Problemas de Oclusão em Realidade Aumentada,Workshop de Aplicações de Realidade Virtual, Uberlandia, 2005 |